前回試し彫りが思いの外すんなりいきましたので、今回はエンドミルを取り付けて切削を試みたのですが、トラブルに次ぐトラブルに見舞われました。今回は切削よりトラブルの記録です。
dreamerdream.hateblo.jp
前回、樹脂が切削出来たので今回はアルミニウムに挑戦ということで、1000円玉を1mmのエンドミルに合わせてデザインしました。

コインといえばキラキラしているものがカッコいいですよね。
キラキラといえばHDDのプロッタですよね?ということで材料確保のためHDDを分解します。

不要HDDをいくつか分解しました。
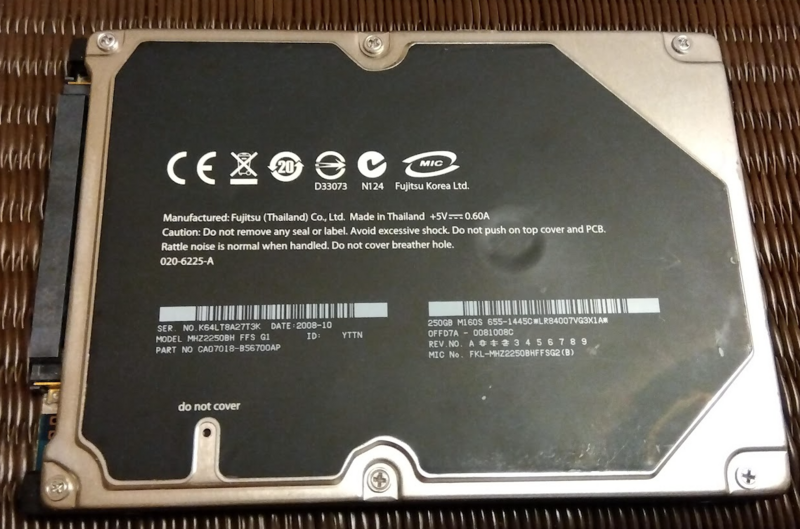
こちらが取り出したHDDプロッタです。大きいものは2mm厚、小さい方は0.5mm厚。
2mmも厚さがあれば丈夫なのでいろいろと使えそうです。

HDDのプロッタは母材にアルミニウムとガラスがつかわれているものがあり、どちらが使われているのかは実際に割ってみないと解りません。
ということでプロッタの端っこをプライヤーでギュッと握ります。
アルミの場合(左)変形します。ガラスの場合(右)割れます。
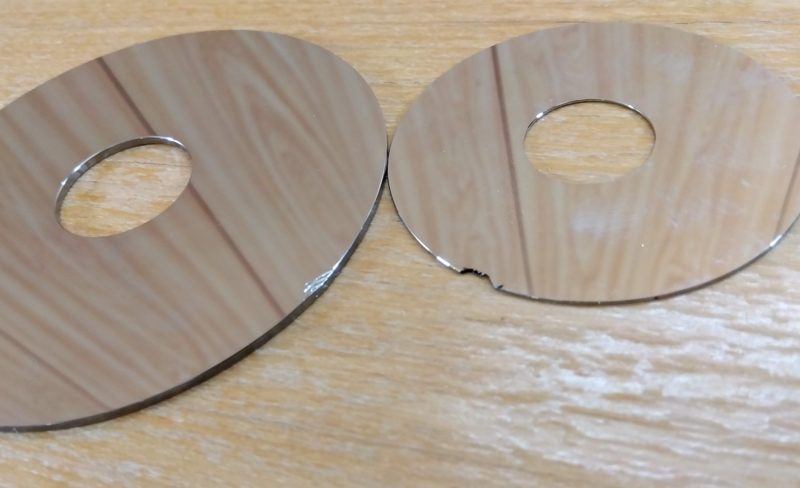
表面に磁性体や保護層が貼ってあるので確実ではありませんが、テスターを押し付けると母材の通りにガラスは∞Ω、アルミは0Ωを示しました(あまり信用のある方法ではありません)。

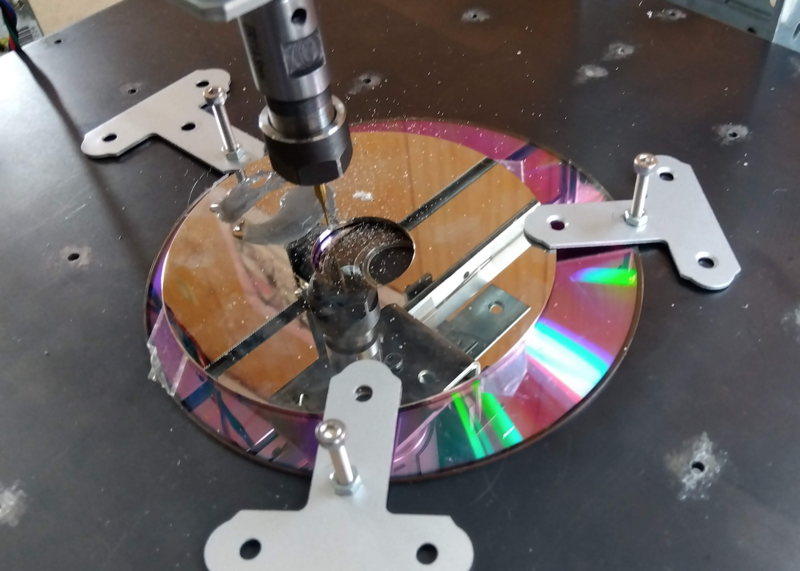
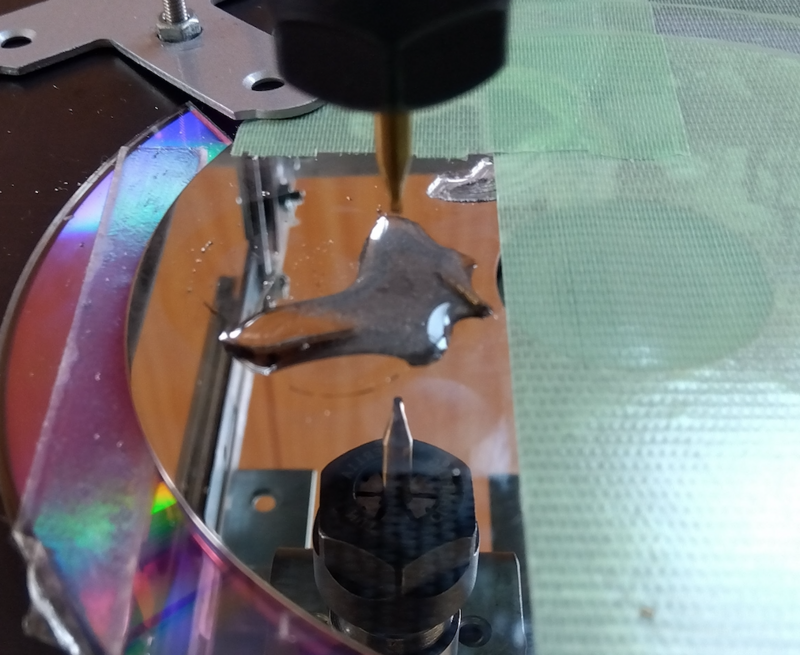
早速両面テープで固定して切削開始です。

中盤に「あれ?なんか変だぞ」と気付きストップしました。
なんと両面テープが外れてしまいました。。。。失敗です。
切削自体はいい感じでしたので残念です。
気を取り直して、上からガッツリテープを貼って再稼働です。

今度は開始10秒ぐらいでエンドミルがポッキリ折れました。。。。まじか・・・・
各太さ2本セットのエンドミルを購入していたのですが、実は切削する前にテーブルにぶつけて1本折ってしまっていたので1mmのエンドミルが無くなってしまいました・・・終了です。今回楽しみにしていたアルミ切削は悲しい結果に終わりました。
削れたものがこちら。

まあ、悪くは無さそうです。

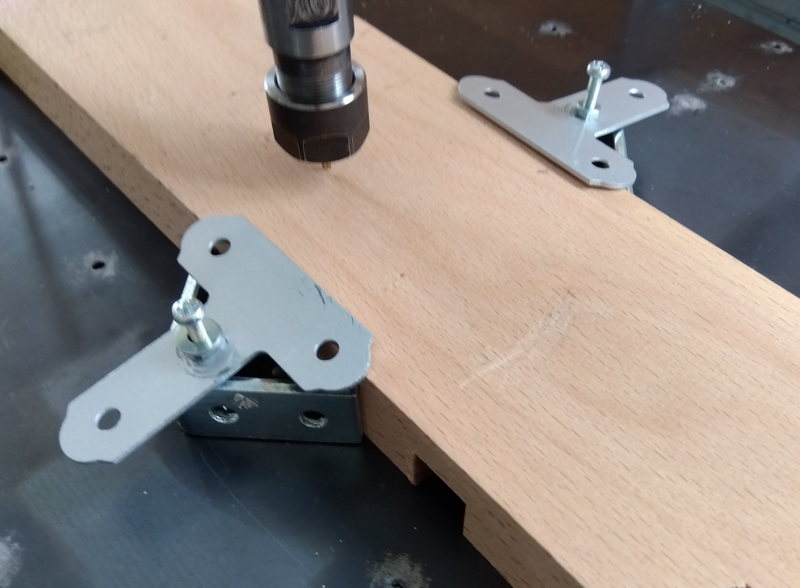
凹んでいる場合では無いので気を取り直して「2mmのエンドミルなら折れないだろ」ということで2mmで木材を切削してみることにしました。
2mm用にデザインしたものがこちらの「肉球」です。

木材をテーブルにセットして切削開始です。
せっかくなので1×4のパイン材ではなく少し硬めの木材です。
開始早々焦げ臭くなります。発火まではしないと思いますが水を手元に用意して掃除機で木くずを吸いながら見守ります。

いい感じだったのですが、途中まで進んで突然ストップしました。
「????」

突然すぎて意味がわかりません。
FluidNCのWi-Fiも検出不能になりました。
とりあえず電源を見直したところ、なんとカメムシが電源に迷い込んで死んでいました・・・
全く意味がわかりません、電源は生きている様子ですがESP32はLEDが無反応です。もしかしたらカメムシが電源ラインに触れてESP32に異常電流が流れて壊してしまったのかもしれません。
USBで繋ぐとUSBは認識するもののESP32は無反応で壊れている様子・・・

せっかくなので蓋を開けてみました。(意味なし)
USBドライバは生きているみたいなので上のESP32チップだけ載せ替えたら使えるかもしれません。手元にあるので試してみようかしら

とまあ、そんなわけでどちらも完了しないまま制御器の修理が必要になってしまいました。さすがに凹みました・・・
切削途中のものがこちら。

いちおうGコード通りに進んでいるのでCNCの本体自体は問題無さそうです。

現在ESP32の在庫が手元に無いので再度注文です。
またFluidNCのインストールからやり直しです。
dreamerdream.hateblo.jp
dreamerdream.hateblo.jp





















")