前回ギアボックスを作って動作が良好でしたので、実際に使うことになるであろうケーブル長のケーブルを用意して実験することにしました。
<前回の実験>
実はこのスマートロックは設計無しの思いつきで始めたので実際の制御機は現時点で全く考えていません。
ただ、電池ではなく外部電源から稼動させたいのでイメージ的にはこんな感じにする予定です↓(ざっくり)

スマートロック機構から制御器まで結構長いケーブルが必要になります。
長いケーブルは手軽な手元にあるLANケーブルを使いたいのですがその際に
- PWM信号が送れるのか?
- 電力線として機能するのか?
ということが心配されます。
玄関の凸凹に会わせてスケーラーで測った結果、ケーブルが約10mぐらいあれば足りるようでしたので10mのLANケーブルを用意し、コネクタをぶった切って実験しました。(下に実験動画があります)
実験
まず、通常のジャンプワイヤーにて問題無く動くことを確認します。
次にCAT6対応のフラットLANケーブルにPWM信号線だけ通します。
これも問題無く動きます。高速通信線なので当然です。
しかし、フラットケーブルの芯は細いより線で作られた構造のもので、実験の結果サーボモーターへの電力供給は実質不可能でした。
(より線に実験しやすいようすずメッキ線をハンダ付けしています)

このケーブルがそのまま使えたら色も配線も簡単な話だったのですが・・・
2本3本と束ねてみてもダメでしたorz。コネクタぶった切ったことに後悔。。。
残念です。
次に、CAT5E対応の単線構造のLANケーブルを用意しました。
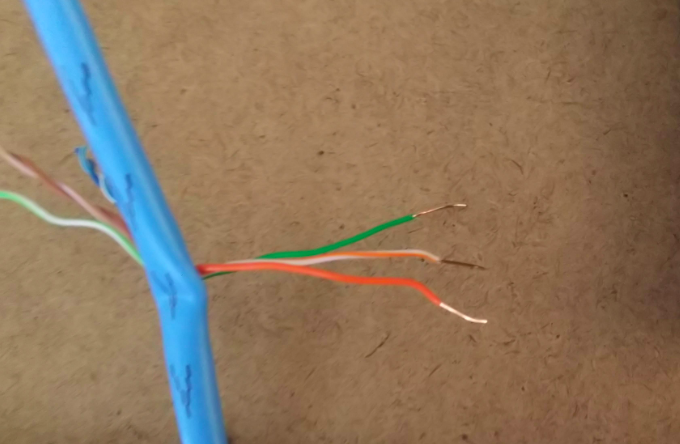
色も型も後から目立たないように加工が必要です。

1本の芯が0.6mmもあるので取り回しも面倒そうです。
実験の結果、10mだとこの線を2本使って電力供給することでしっかりと動作することが判明しました(1本でも動くけど、実際に鍵を回すとなるとパワー不足に陥ることが判明、結果的に+ー共に2本必要でした)。
実際にサムターンを回してみました。大成功です!
しかし、下のサムターンを回そうとすると・・・上のサムターンより若干固いらしく回りません!問題発生です。
試しにSG90の偽物にしたら・・・余計に回らないことに。。。orz
<SG90の本物と偽物の比較>
過去記事で「偽物でも割と使えそう」と書いていましたが、実験でどうやら偽物はパワーが本物より弱かったことが判明しました。
動画では残っていませんが、本物の方は解錠動作だけは辛うじて回るようですが偽物はとても回る気配がありません。
そこで、SG90の強化版サーボモーターSG92Rに組み替えたところ、今度は見事に成功しました!
SG92RはSG90とほとんどサイズは一緒なので3Dプリンターの出力モデルを変更することなくそのままSG90と同じマウントのまま使えました。
")
SG92Rのサイズ感に関しては過去記事参考↓
次回、このサーボモーターを制御する方法を考えます。

